测角方法及其比较
相位法测角
两天线相位法测角基本原理
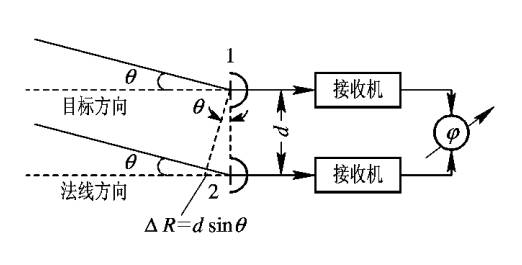
利用电磁波在空间中传播到不同位置接收天线时产生的相位差,来反推目标的方向(角度)。
其本质是将空间上的距离差,转化为相位差,再通过测量相位差来解算角度。
电磁波每传播一个波长 的距离,相位变化。
提示
短基线保证大的无模糊测角范围。
长基线保证高的测角精度。
测角误差分析与多值性
多基线测角
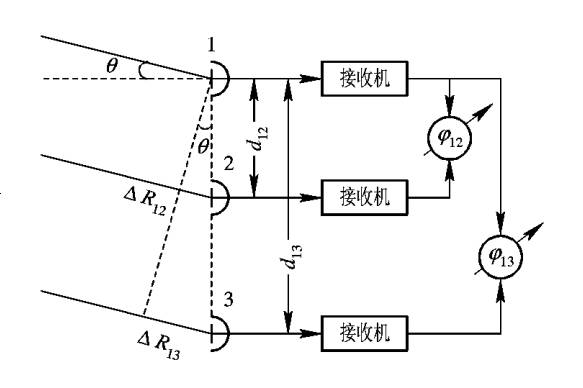
式中,,,都可以读出数值,根据读数确定的值。进而计算出更为精确的值,最后,推断出的值。
振幅法测角
最大信号法
工作过程
雷达天线在转动,当回波弧度最大时所测得角,即为当前角度。
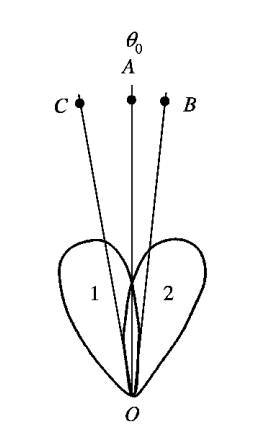
等信号法
提示
两天线方向图相同,交叠位置大约在3分贝处。
工作原理
- 比幅法
天线波束:天线产生两个完全相同的波束,它们在空间上关于天线轴对称,并有一部分重叠。重叠区域的中心线就是“等信号轴”。
波束A的方向图函数为
波束B的方向图函数为
其中 是单个波束最大值方向与等信号轴()的夹角。
信号接收:当目标位于方向 时( 是相对于等信号轴的偏角),两个通道接收到的信号电压幅度分别为:
是一个与距离、目标反射率等有关的常数。
计算幅度比:系统计算两个信号的幅度比(或差值)。比值 与目标的偏角 有确定的函数关系:
或者使用差值:
测角:
判别方向:如果 (, ),说明目标偏在等信号轴的A侧;反之,则偏在B侧。
判别大小:比值 的大小直接反映了目标偏离等信号轴的角度 的大小。通过预先标定好的 曲线(称为“角误差特性曲线”),就可以精确计算出偏角 的值。
实现等信号:在自动跟踪系统中,这个误差信号 会被反馈给伺服系统,驱动天线转动,使 趋向于零。当天线对准目标时,,则 ,,天线停止转动。
优点:原理简单直观。 缺点:测角精度依赖于两个通道(放大器、接收机等)的幅度一致性。如果两个通道的增益特性有微小差异,就会直接带来测角误差。
- 和差法
和差法同样使用两个重叠的波束,但它利用微波网络(如魔T、双T、3dB电桥等)形成“和”信号()与“差”信号(),从而将角误差信息蕴含在信号的相位中,而相位比对幅度的一致性不敏感。
天线波束与和差网络:
两个馈源(或阵列)分别产生波束A和B。
通过一个微波和差比较器( magic-T ):
和通道:
差通道:
信号特性:
和信号 :其方向图是两个波束的叠加。在等信号轴方向 () 有最大值,用于测距和作为相位参考基准。
差信号 :其方向图呈奇对称。在等信号轴方向 () 为零值(谷点),越偏离零点,信号幅度越大。其相位(0°或180°)则代表了偏离的方向。
测角原理:
当目标偏离等信号轴时,。
判别方向:将差信号 与和信号 进行相位检波。
如果目标偏在A侧,则 与 同相。
如果目标偏在B侧,则 与 反相(相位差180°)。
判别大小:误差电压的大小正比于 ,即差信号与和信号的幅度比。这个比值与偏角 成正比。
误差电压 (在小角度下近似线性)
实现等信号:自动跟踪系统根据误差电压的极性(相位) 判断驱动方向,根据大小判断驱动速度,最终使天线对准目标,此时 ,误差电压为零。
优点:
高精度:利用相位信息判别方向,对接收机通道的幅度增益一致性要求大大降低。
高数据率:理论上可以从一个脉冲回波中同时获得“和”、“差”信息(故名“单脉冲”),避免了目标起伏带来的误差,数据率高,适合跟踪高速目标。
缺点:系统复杂,需要和差网络和多通道接收机(至少需要和、差两个通道)。
特点
优点:便于角度跟踪
缺点:最大作用距离小于最大信号法
自动测角的原理和方法
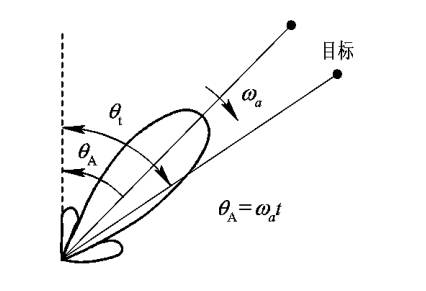
圆锥扫描自动测角系统
基本原理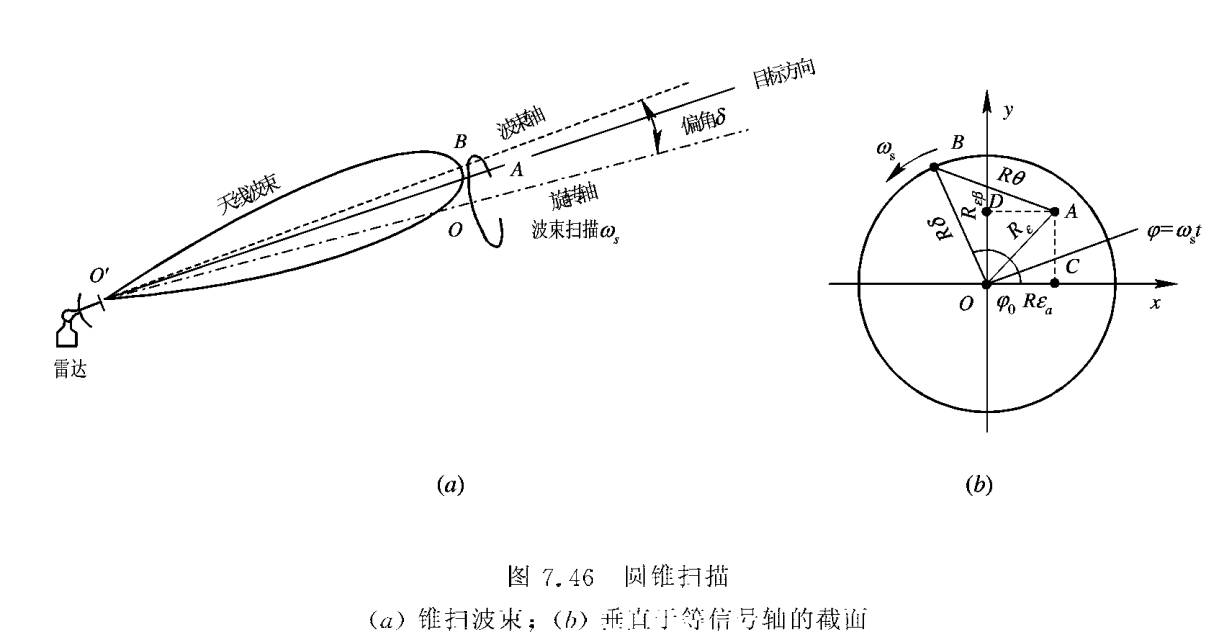
单脉冲自动测角系统
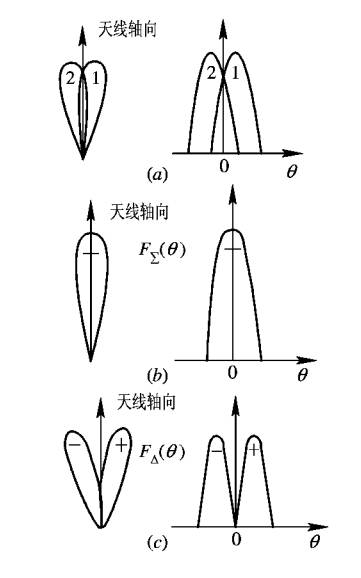
(a)两馈源形成的波束
(b)和波束
(c)差波束
振幅和差式单脉冲工作过程
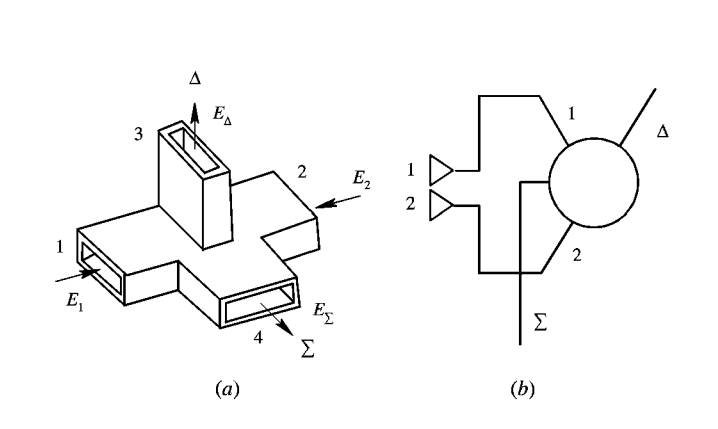
雷达发射过程
将发射信号输入端,端无输出。1,2端输出同幅同相信号。
雷达接收过程
双T接头的1,2端输入。端输出差信号,端输出和信号。