脉冲法测距
基本原理
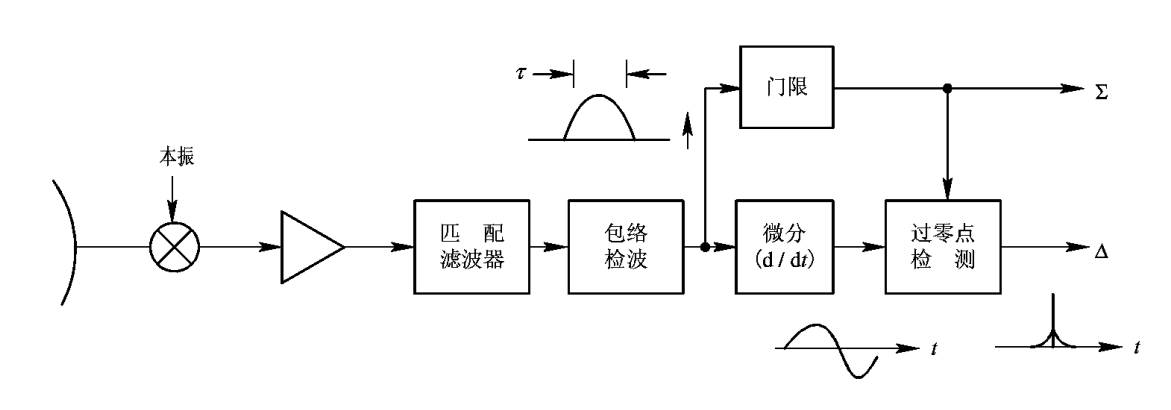
由于回波信号的前沿往往存在斜坡、振荡或噪声干扰,难以精确确定其起始时刻,因此采用发射信号和回波信号的中心点(如峰值或能量对称点)作为时间基准。这种方法利用信号中心位置受畸变影响小、稳定性高的特点,通过计算两中心点的时间差来测量传播延迟,从而提高测距精度,尤其适用于前沿不理想或信噪比较低的场景。
回波脉冲中心测量方法
影响测距精度的因素
测量误差为:
时间差的影响
速度变化的影响
大气折射的影响
测读方法的误差
距离分辨率和测距范围
距离分辨率示意图
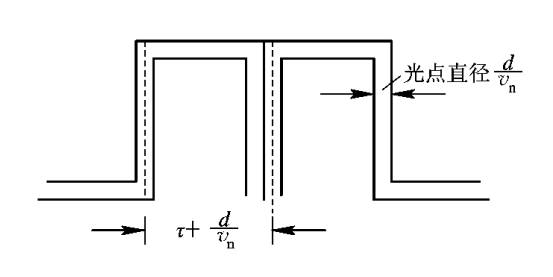
定义距离分辨率为:
- 为光点直径;
- 为光点扫掠速度
最小测距范围
:收发开关
最大无模糊测距范围
最大不模糊距离,指的是雷达能够明确无误地测量目标距离的最大值。超过这个距离的目标回波,会因为时间上的混淆,被雷达误判为一个更近的虚假目标。
最小测距范围:
为收发转换开关转换时间
距离模糊的判决方法
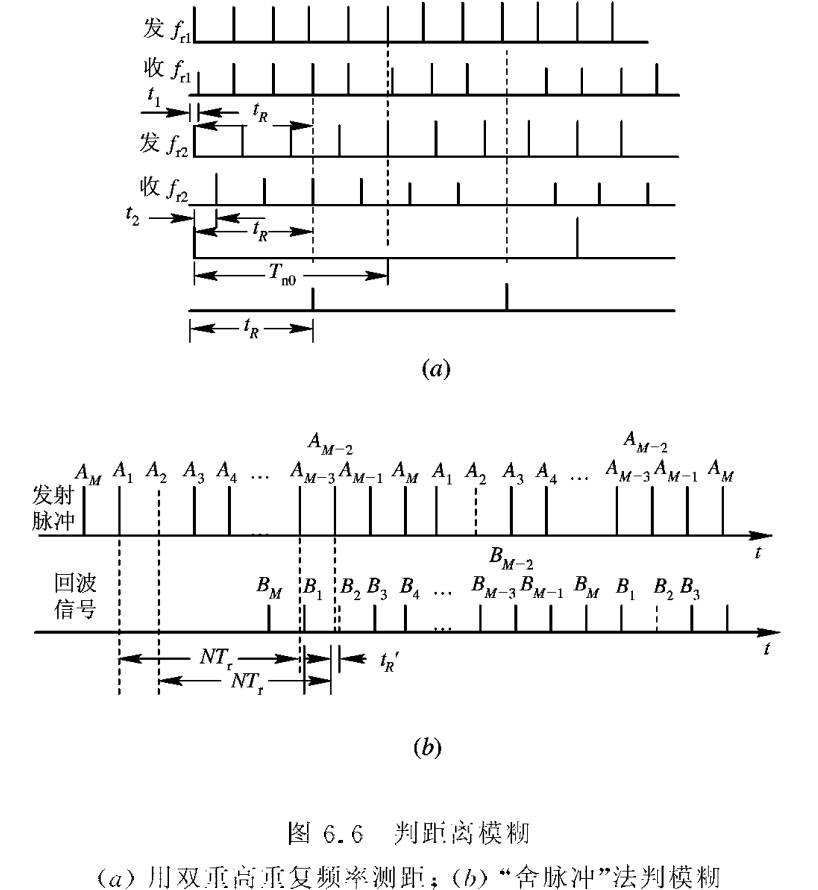
如果一个目标距离足够近,它的回波在下一个脉冲发射之前返回,雷达能正确计算出它的距离。
如果一个目标非常远,它的回波需要很长的时间才能返回,以至于在下一个脉冲(甚至下下一个脉冲)发射之后才到达接收机。
此时,雷达无法区分这个回波到底是第一个脉冲的回波(来自远距离目标),还是第二个脉冲的回波。
高脉冲重复频率:为了提高对高速目标的测速能力会导致距离上很容易模糊。这种模式常用于机载雷达的空空模式(优先跟踪高速飞机,对距离精度要求可降低)。
低脉冲重复频率:为了获得大的不模糊距离,需要采用低 PRF。但这会导致 多普勒测速能力变差,容易发生速度模糊。这种模式常用于地面远程预警雷达(首要任务是看清远距离目标)。