雷达的任务概述
雷达组成部分
雷达主要由以下部分组成
天线:发射信号、接收回波发射机:产生射频信号
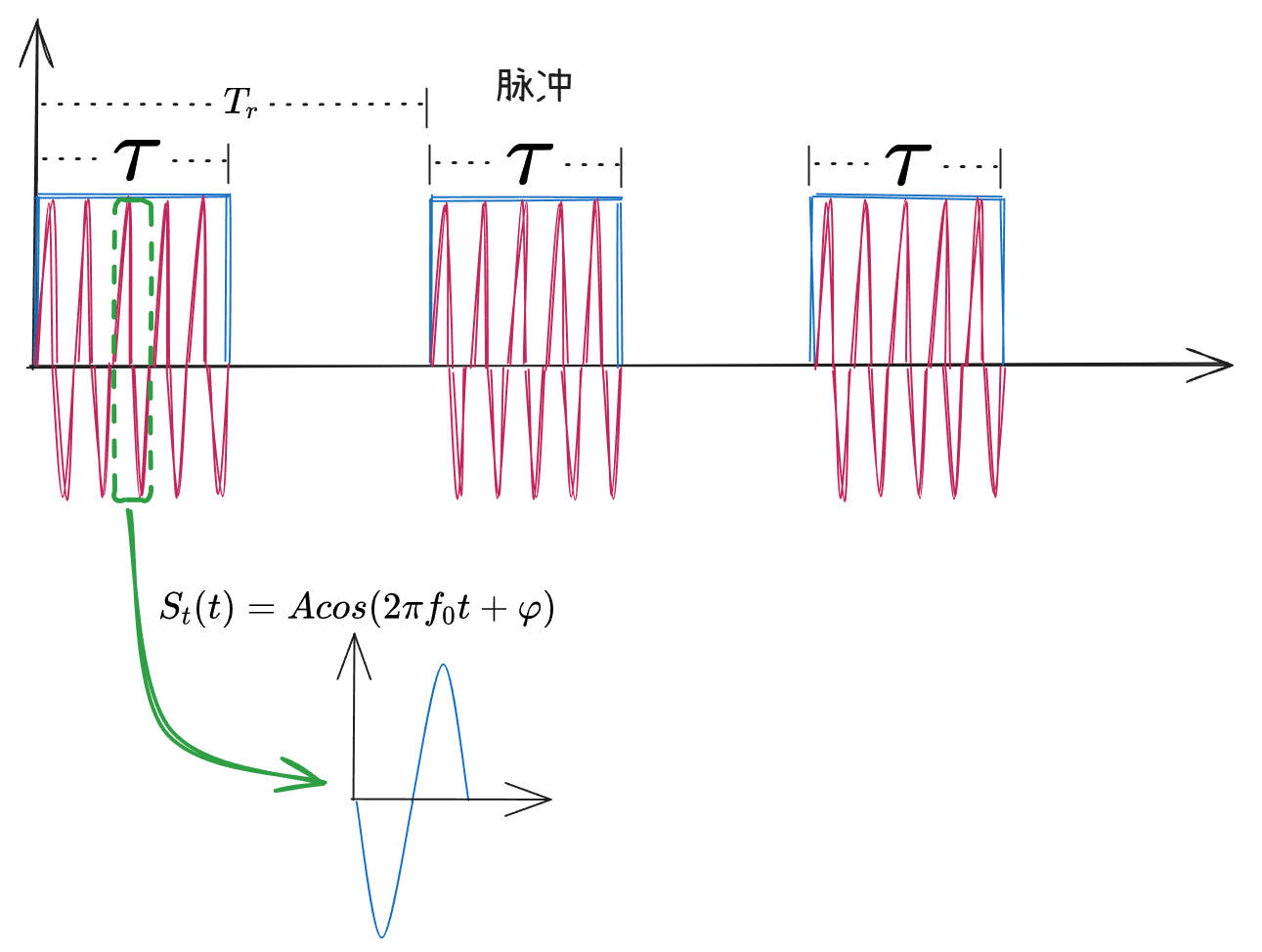
雷达发射的波为电磁波,发射的射频信号为余弦信号,其中为载波频率,存在关系。
雷达为节约能量通常不采用连续工作模式,通常采用脉冲方式进行工作,每个脉冲工作的时间为(脉冲宽度),每个脉冲周期为。
射频信号
射频信号是指频率在 几MHz~几GHz 范围内的电磁波信号。
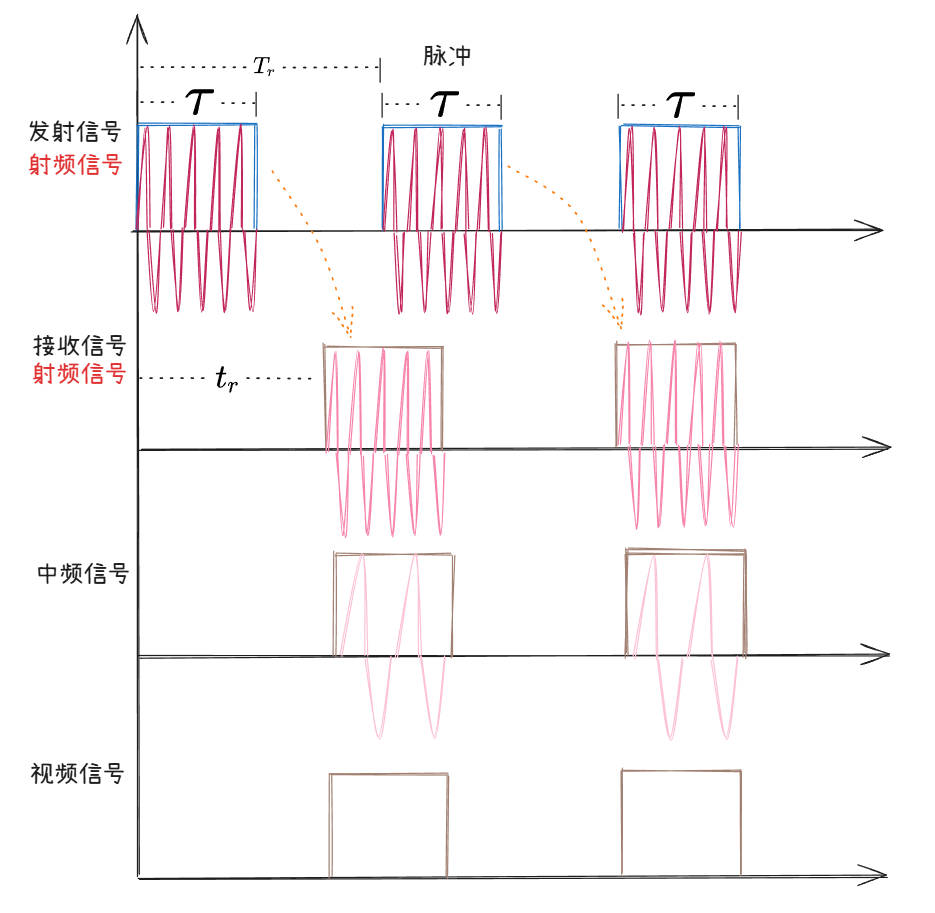
接收机:接收射频信号射频 --> 中频 --> 视频
信号处理机:提取目标信号信息终端显示设备伺服系统:同步设备
目标的参数测量
坐标系
球坐标(, )
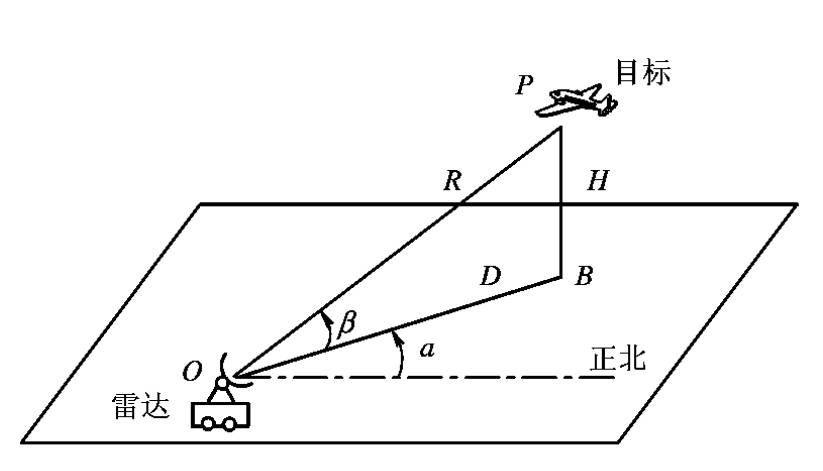
距离测量
角度测量
条件
电磁波是直线传播
雷达天线具有方向性。雷达天线分为有方向和无方向性
天线方向图
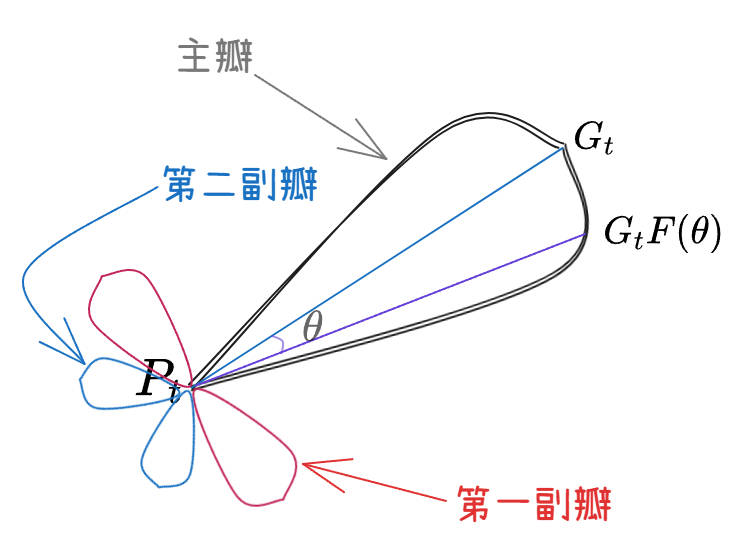
在雷达天线的主瓣内,某个方向偏离最大值方向越大,这个方向的增益越小。
速度测量
重要
雷达测速是基于多普勒效应 进行测速。
多普勒频率是将发射信号与接收信号混频,得到差频。
多普勒频移与目标速度的关系为:,其中为多普勒频率。
雷达测速要点
雷达测速测的是径向速度,只能测量目标沿雷达波束方向的速度分量。横向运动无法直接检测。若飞机绕着雷达做圆周运动,则雷达认为速度为0。
多普勒效应可以判断出目标是远离雷达还是靠近雷达运动。
基本雷达方程
基本雷达方程: 雷达最大作用距离方程
:发射机峰值功率
:发射天线增益
:接收天线增益
:雷达工作波长
:目标雷达截面积 (RCS)
:接收机最小可检测信号功率
常数项
雷达的工作频率
常用的工作频率段:
| 频段名称 | 波长 |
|---|---|
| 22cm | |
| 10cm | |
| 5cm | |
| 3cm | |
| 2.2cm | |
| 8cm |